速度と安全の関係

速度と安全の関係
日本では「速度違反は危険」とされている。しかしながら、規制速度は、全国一律の法定速度から逓減的に決められたに過ぎず、科学的根拠はない。仮に合理的な速度規制がなされたとしても、それぞれの道路区間における安全/危険は、それほど単純に分けられるものではありません。
ここでは、警察庁が主導する「違反は危険」の絶対論から離れて、安全の本質を考えてみよう。
なお、![]() 高速自動車国道/それ以外すべての道路での分類はあまりに雑なので、ここでは
高速自動車国道/それ以外すべての道路での分類はあまりに雑なので、ここでは![]() 地域高規格道路を想定する。
地域高規格道路を想定する。
まずは現状。ほとんどの地域高規格道路は、数キロに渡って同一の規制速度となっている。これら規制速度は、設計速度と同じ速度に設定されていることが多い。次の図に現状の速度規制を示した。

しかしながら、道路には、長い直線区間もあればカーブもある。カーブの曲がり具合も様々だ。そして、経験と良識のあるドライバーとライダーは、様々な情報から走行速度を選択します。
- 道路の基礎条件(車線数・路線幅・カーブならその半径)
- 環境(天候・視界・路面状態)
- 前後左右の車両の有無、および、その位置・走行速度・挙動
- 交差点の有無・車両の出入りの可能性
- 車道に歩行者が飛び出す可能性
- 運転するクルマの性能と状態
- 自分の体調と精神状態
- 警察条件(規制速度・パトカーや定置網の有無)
さらに、突然の障害物などの危険因子に対応するため、セーフティ・マージンを差し引いた速度を選択している。この調整は、それぞれドライバーが、危険因子に対応する経験を積み重ねることで、独自の「予測モデル」を形成することによって可能になる。
予測モデルに学習を重ね、それを運転に応用する作業は、ドライバーとライダーが無意識に行っていることである。なお、免許を取って5年以下、または10万キロ以下の走行では、予測モデルとしては不十分だ。
次の図には、経験と良識のあるドライバーとライダーが先導した結果として発生する「道路の自然な流れ」から、85パーセンタイル速度を青線で示した。上下に振れているのは、運転にメリとハリがあるからだ。

「速度違反は危険」のプロパガンダに感化された人は、速度違反と聞くと、悪質な暴走行為をイメージする傾向がある。しかしながら、限界を試すかのような速度違反は、青い曲線よりはるかに上方だ。
安易な極論を排除するために、限界を試すかのような走行速度を赤線で示した。
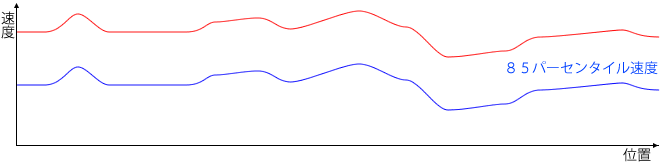
赤い線で走行する車両は皆無に等しい。そして、青線に近づくほど、その速度で走行する車両は多くなる。このことは、85パーセンタイル速度が経験あるドライバーとライダーの良識を数値化したものであることを示している。
次に具体的なシーンを織り込もう。
実際の走行において、ドライバーとライダーは、さまざまな危険因子を察知する。次の図は、危険因子に対するアクションを織り込んだ動的モデルである。

次に最初の図に示した規制速度を追加した。

緑色の線が、赤紫色の線を下回っている区間があることに着目して欲しい。これは、漫然と規制速度で運転することが、決して安全ではないことを示している。
次に、警察官が「違反が多いところで取締ることに交通安全の効果がある」として「ねずみ捕り(正式な警察呼称は「レーダー式車両走行速度測定装置を使用した速度取締り」らしい)」ポイントを追加した。なお、図中の速度曲線は、静的な曲線に戻した。

違反が多いところは、良識あるドライバーとライダーが様々な情報から総合的に安全だと判断した道路区間である。それが違反とされ、懲罰の対象となる。また、警察が「交通違反は犯罪だ!」と広報する対象にもされてしまう。
 ところで、現在、自動運転の実現に向けた研究が進んでいる。自動運転の最大の難題は、青線のように、様々な条件のみならず、予測モデルを織り込んだ速度を算出することである。規制速度プラスαで走行させるだけなら、きわめて簡単なことだ。
ところで、現在、自動運転の実現に向けた研究が進んでいる。自動運転の最大の難題は、青線のように、様々な条件のみならず、予測モデルを織り込んだ速度を算出することである。規制速度プラスαで走行させるだけなら、きわめて簡単なことだ。
数十万キロを走行した良識あるベテラン・ドライバーが、現在の機械では為し得ない「しなやかさ」を持って選択した速度さえ、犯罪とされてしまうのは、あまりにも規制速度が低いからだ。
執筆者プロフィール

- ライター
- 創世カウンシル代表
最新の投稿
- 2013年11月3日国家公安委員長の疑問
- 2014年11月15日速度と安全の関係
- 2013年11月24日85パーセンタイル速度と規制速度の関係
- 2013年11月7日争点は速度規制の合理性と取締りの妥当性